The CSR-Rescue uses sequential programming technique. The
compiler executes the program statements sequentially in a “top-down” manner.
Therefore, the order of the statements in the program plays a very important
role in deciding the priority of statements with the same type.
In order to synchronize the virtual robots and maintain
real-time data updating, the CSR-Rescue Simulator automatically scans all
sensors’ readings in an interval of 60 ms. In other words, all the variables
associated with sensors will be updated every 60 ms. Fig. 8-16 shows the
program execution flow.
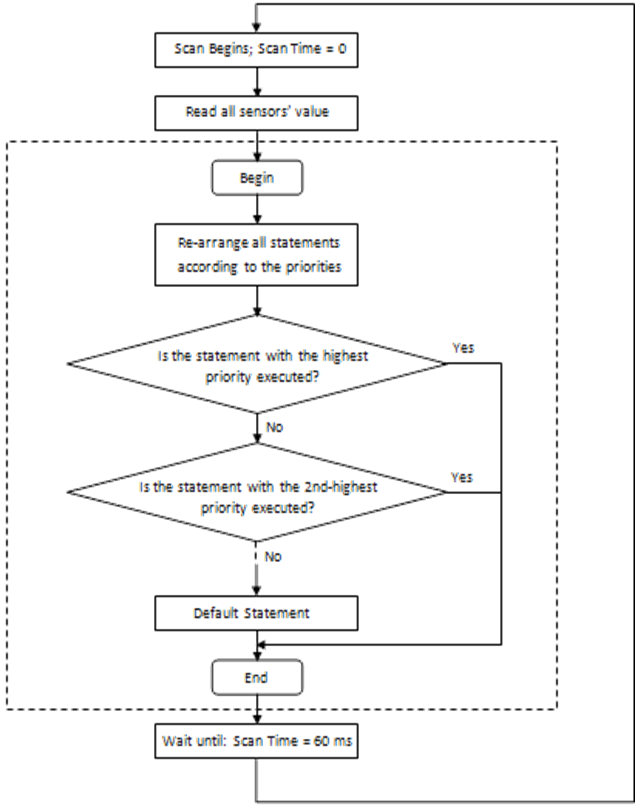
Fig. 8-16:
Program execution flow
The priority of each statement is set in statement type.
The type of
the statement has to be specified when each new statement is added. There are
three types of statements for different requirements, namely default action, non-interrupt
action and super action as shown in Fig. 8-17.
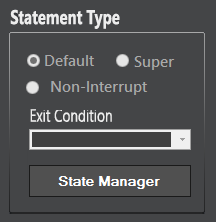
Fig. 8-17:
Statement types
Default
action
v
The default action statement has the lower
priority comparing to the Super action. A project can contain many default
action statements.
Non-interrupt
action
v
The non-interrupt statement has the same
priority as the default statement. When the non-interrupt statement is
executed, it will not be interrupted or terminated unless:
1.
The exit action condition is met.
2.
The super action statement is executed.
v When the non-interrupt
action is specified, it is necessary to define an exit condition for this
action. That means the non-interrupt statement will only be terminated when the
specified exit condition is true.
v
A project can contain many non-interrupt
action statements.
Super action
v The
super-action statement has the highest priority. Once the condition for the
statement is true, it will be executed immediately. All other actions will be
interrupted.
v A project can
contain many super action statements.