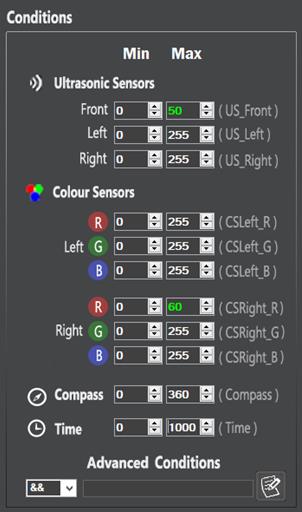
The following
sensors readings are used for specifying conditions.
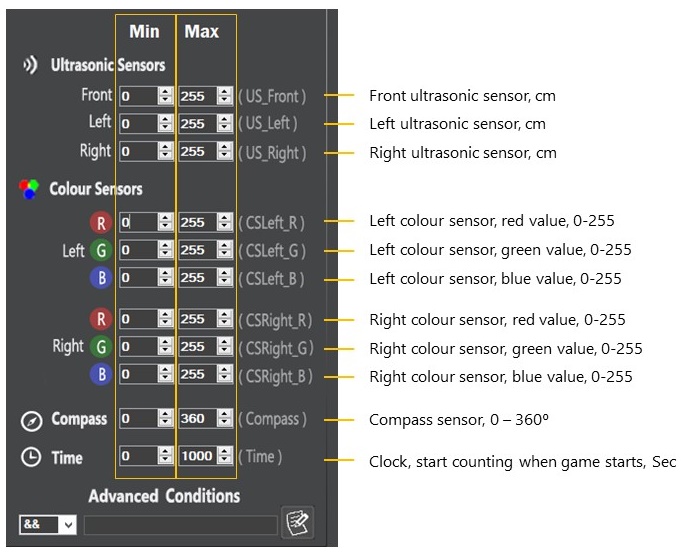
Fig. 8-22:
Add a new state
You can also use self-defined variables.
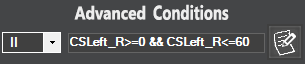
All sensors values are having “AND” relationship. For
example, the conditions specified in Fig. 8-23 defines:
[(US_Front
≥ 0) and (US_Front ≤ 50)] AND [(US_Left ≥ 0) and (US_Left ≤ 30)] AND
[(CSLeft_R > 200 AND CSLeft_R <255)]
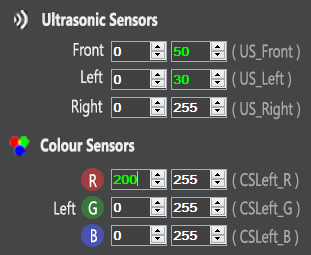
Fig. 8-23:
Add a new state
More
examples:
The simple conditions can be defined using the slider to
specify the data range.
|
Condition |
How to program… |
|
0 ≤ US_Front ≤ 50 |
|
|
40 ≤ US_Left ≤ 80 |
|
|
0 ≤ CSLeft_R ≤ 60 |
|
|
0º ≤ Compass ≤ 45º |
|


You can combine any two or more conditions using the same
method. Please note that the relationship between these conditions will be
“Logical AND”.
|
Condition |
How to program… |
|
0 ≤ US_Front ≤ 50 and 0 ≤ CSRight_R ≤ 60 |
|
|
0 ≤ US_Front ≤ 50 or 0 ≤ CSLeft_R ≤ 60 |
Combine
basic and advanced conditions
|