In the advanced programming
function, you can write simple codes for specific conditions and actions.
The Advanced programming supports the symbols
for C arithmetic operations and relational operators.
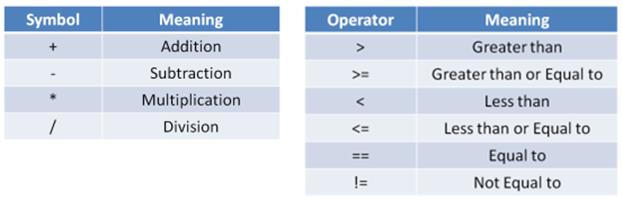
Fig. 8-26: C
arithmetic operations and relational operators
You can use all variables including
system variables and self-defined variables in the advanced conditions and
actions.
Pre-defined
variables |
What it
means … |
|
US_Front |
The
distance between obstacles and the front ultrasonic sensor. Range: 0 – 255 cm |
|
US_Left |
The
distance between obstacles and the left ultrasonic sensor. Range: 0 – 255 cm |
|
US_Right |
The
distance between obstacles and the right ultrasonic sensor. Range: 0 – 255 cm |
|
CSLeft_R |
The red
channel value of left RGB colour sensor. Range: 0 - 255 |
|
CSLeft_G |
The green
channel value of left RGB colour sensor. Range: 0 - 255 |
|
CSLeft_B |
The blue
channel value of left RGB colour sensor. Range: 0 - 255 |
|
CSRight_R |
The red
channel value of right RGB colour sensor. Range: 0 - 255 |
|
CSRight_G |
The green
channel value of right RGB colour sensor. Range: 0 - 255 |
|
CSRight_B |
The blue
channel value of right RGB colour sensor. Range: 0 - 255 |
|
Compass |
Compass
sensor. It is 0o when facing score board. Range 0 – 360o |
|
Time |
The clock
runs when game starts |
|
WheelLeft |
Left
wheel speed, Range (-5) – (+5) |
|
WheelRight |
Right
wheel speed, Range (-5) – (+5) |
|
LED_1 |
LED
status: LED_1 = 0 (off); 1 (blink); 2 (steady on) |
|
LoadedObjects |
Loaded
objects counter. LoadedObject will be added by “1” when the “FindObject” key
action is executed. LoadedObject will be reset to “0” when the “Deposit” key
action is executed. |
|
SuperObj_Num |
When
Super or Super+ objects appears, the “SuperObj_Num” will be set to 1. It will
only last for about 2 sec. |
|
SuperObj_X |
When
Super or Super+ objects appears, the “SuperObj_X” indicates the X coordinates
of the Super Object. It will only last for about 2 sec. |
|
SuperObj_Y |
When
Super or Super+ objects appears, the “SuperObj_Y” indicates the Y coordinates
of the Super Object. It will only last for about 2 sec. |
|
Teleport |
If you
wish to teleport to the 1st location in the WORLD_2, set Teleport = 1; If you
wish to teleport to the 2nd location
in the WORLD_2, set Teleport = 2; If you
wish to teleport to the 3rd location
in the WORLD_2, set Teleport = 3; |
|
PositionX |
X
coordinate of the robot current position. It is only available in WORLD_2. |
|
PositionY |
Y
coordinate of the robot current position. It is only available in WORLD_2. |
|
Duration |
Duration
is associated with the “default” or “non-interrupt action” statement.
Duration is used to specify the time that the action is executed continually.
Within this period, the robot’s action will not be interrupted by other statement,
except Super action statement. The “Duration” is for default action or
non-interrupt action. When
Duration = 1, it means the action will continually running for 60 ms When
Duration = 2, it means the action will continually running for 120 ms When Duration
= 3, it means the action will continually running for 180 ms ….. |
|
SuperDuration |
Same as
the Duration. It is for Super Action. |
|
bGameEnd |
Not in
use. |
|
CurAction |
System
variable |
|
CurGame |
System
variable |
|
TM_State |
System
variable |
|
MyState |
Not in
use |
Advanced
Conditions
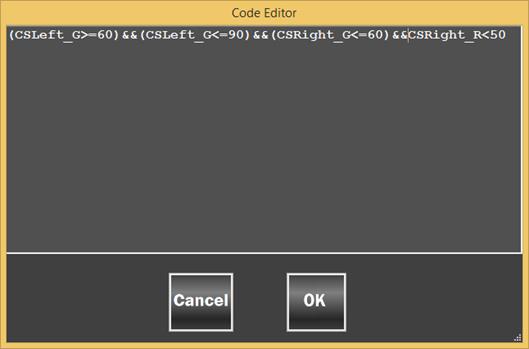
The advanced conditions are used for more complicated
combination of conditions. Here is the procedure:
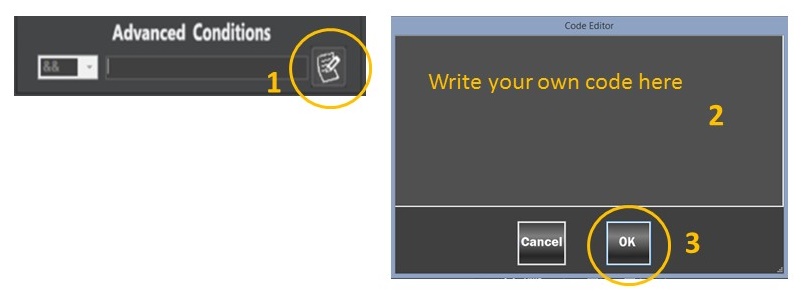
Fig. 8-27:
Advanced Conditions/Actions Code Editor
More examples:
|
Condition |
How to program… |
|
0 ≤
US_Front ≤ 50 and 0 ≤
CSLeft_B ≤ 60 |
|
|
0 ≤
US_Front ≤ 50 or 0 ≤
CSLeft_B ≤ 60 |
|
|
40
≤US_Left ≤ 80 and CSRight_G
≥ 100 |
(US_Left>=40&&US_Left<=80)&&(CSRight_G>=100) |
|
40 ≤
US_Right ≤ 80 or CSRight_R
≥ 100 |
(US_Right>=40&&US_Right<=80)||(CSRight_R>=100) |
|
0 ≤
CSLeft_R ≤ 60 and 45o
≤ Compass ≤ 90o |
(CSLeft_R<=60)&&(Compass>=45&&Compass<=90) |





You can use the graphical interface to edit the basic
conditions. You can also write your own code in the code editor to create the
advanced conditions. The advanced conditions can be combined with the basic
conditions to fulfil more comprehensive requirement.
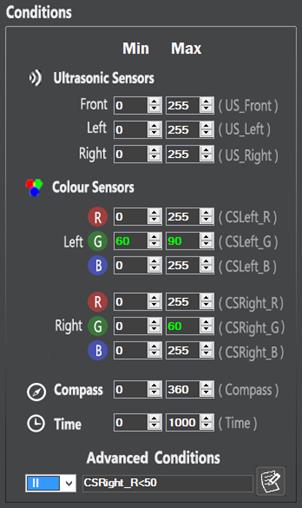
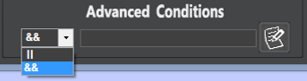
The basic conditions and advanced conditions can be
combined using logic-and or logic-or.
More examples:
|
Condition |
How to program |
|
60 ≤ CSLeft_G ≤ 90 and 0 ≤
CSRight_G ≤ 60 or 0 ≤
CSRight_R < 50 |
|
|
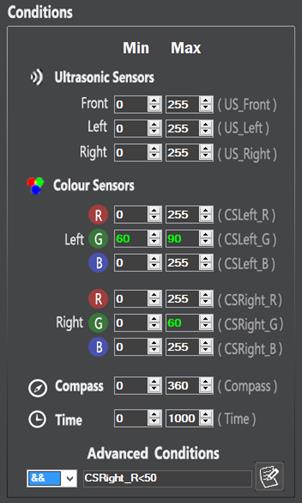
60 ≤ CSLeft_G ≤ 90 and 0 ≤
CSRight_G ≤ 60 and 0 ≤
CSRight_R < 50 |
|
|
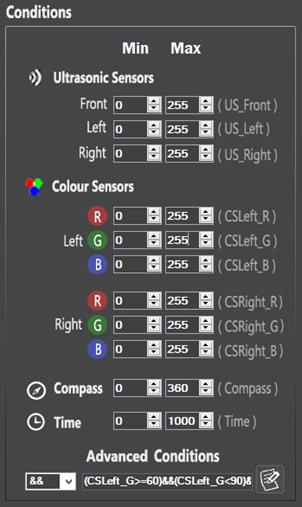
60 ≤ CSLeft_G ≤ 90 and 0 ≤
CSRight_G ≤ 60 and 0 ≤ CSRight_R < 50 |
|