There are two
types of virtual robots in CSR-Rescue simulator. Both types of robots are
equipped with 3 ultrasonic sensors, 2 colour sensors, and 1 compass sensor as
shown in Fig. 6-1. The sensors are used to detect obstacles/boundaries, colour
objects and the robot orientation. The physics models of the two robot are slightly
different (such as sensors positions, wheels position, robot weight etc).
Hence, the performances may differ when the same program is loaded.

Fig. 6-1:
CoSpace Rescue Challenge virtual robots
Sensors
v 3 ultrasonic
sensors are fitted at front, left, right and back of the robot.
Each sensor feedbacks the distance towards obstacle detected in centimetres.
These sensors are also used to detect walls and boundaries.
v 2 colour
sensors are mounted at the bottom of the robot. The colour
sensor returns R, G, B channel values of the colour object detected. The R G B
value ranges from 0 to 255.
v 1 compass
sensor is fitted at the back of the robot. It measures the
robot’s direction in degrees.
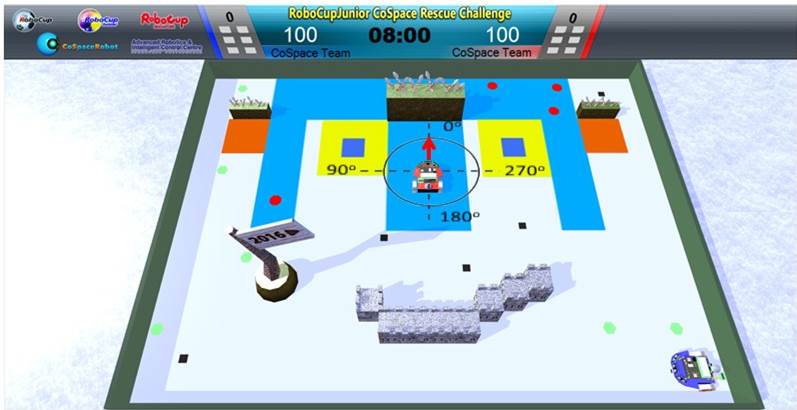
Fig. 6-2: Robot orientation
Motors
(Output)
v 2
independently controlled motors provide power to the robot. “+5”
is the maximum forward speed while “- 5” is the maximum backwards speed.
LED (Output)
v 1 LED to indicate
robot status when it is collecting or depositing objects.